
- Visión General
- Descripción del producto
- Parámetros del producto
- Instrucciones de instalación
- Perfil de la empresa
Información Básica.
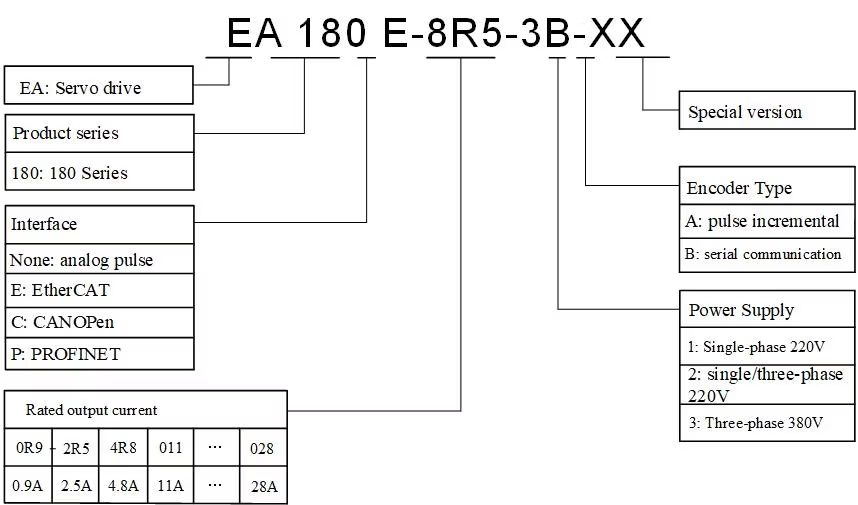
No. de Modelo.
EA180E
Modelo Matemático
Lineal
Señal
Continuo
Función
Control Automático
Certificación
ISO: 9001, CE
Condición
Nueva
Personalizado
Personalizado
Material
Aleación de aluminio
función de prevención de sobremarcha
p-ot, n-ot surten efecto, parada de deceleración
modo de comunicación
rs232, ethercat
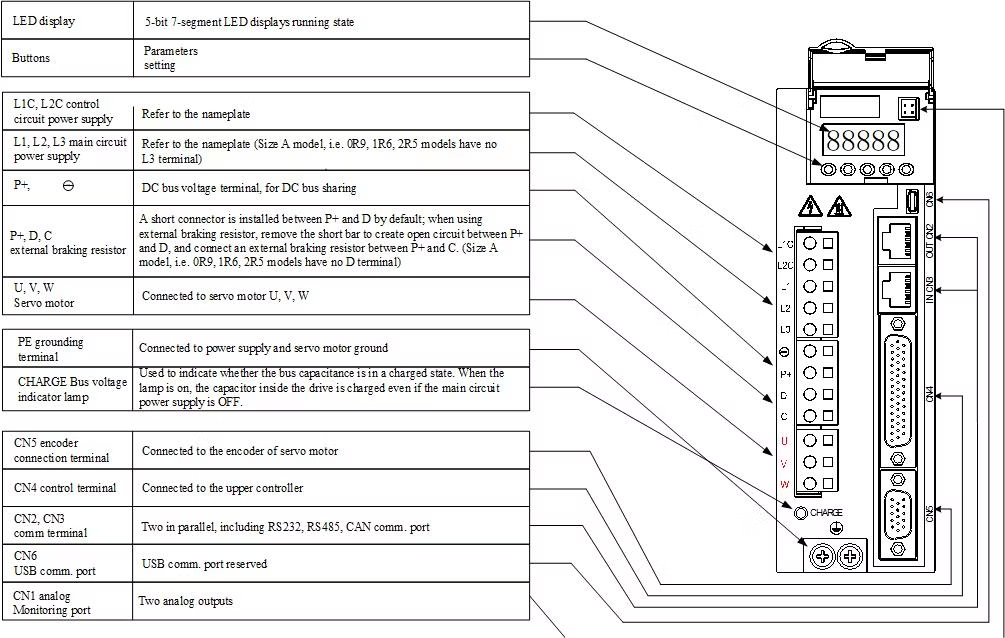
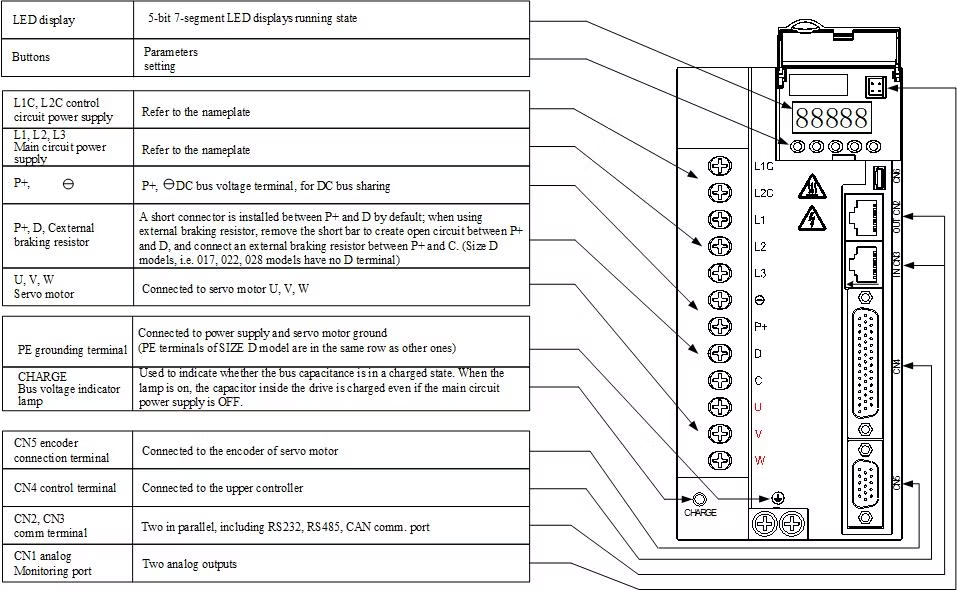
pantalla led
display led de 5 bits: carga del circuito principal
Paquete de Transporte
wooding
Marca Comercial
sinee
Origen
China
Capacidad de Producción
400000sets/año
Descripción de Producto
Servomotor integrado EtherCAT de alta fiabilidad para la red ethercat servo para Servocontrolador de 2 ejes
•menor tiempo de posicionamiento.
• Alta velocidad y alta precisión sincrónica en tiempo real
comunicación basada en el diseño de sistemas paralelizados.
Posicionamiento de alta precisión
•codificador de valor incremental de 17 bits y absoluto de 23 bits,
con el potente rendimiento de control, puede hacer que el
precisión de posicionamiento inferior a 5 pulsos de encoder.
Serie de productos de Abandant
•Analog & pulse Standard y Network Type con
Compatible con el protocolo EtherCATor CANopen o RS485;
•2500 ppr o tipo serie incremental de with17 bits o 23 codificador de valores absolutos de bit disponible
Tamaño pequeño
•Tamaño similar a la unidad Panasonic serie A6, junto con el servomotor SINEE SES, puede ayudar a minimizar el volumen del sistema.
Controles inteligentes
•supresión de resonancia inteligente
El sistema tiene cuatro (4) sistemas de supresión de resonancia de alta frecuencia
Filtros de muesca, dos (2) de ellos son los basados en FFT; los otros
son manuales.
De forma sincrónica, se proporcionan los filtros de supresión de vibraciones
para minimizar la vibración de la máquina de brazo largo.
•Control de las funciones de conmutación de ganancia
La estructura del bucle de control sobre la base del PDFF puede reducir
sobredisparo eficiente.
El parámetro auto-ajuste en base a la inercia
puede mejorar la adaptabilidad del sitio.
Alta fiabilidad
•función de protección completa y diseño EMC
Diseño de la función de protección en función de la fiabilidad general del motor y el conductor;
Diseño de EMC basado en la optimización graduada y la adaptabilidad del sistema.
•material y tecnología de motor de alto rendimiento que garantizan el funcionamiento del sistema de forma fiable
Que contiene acero magnético de disprosium-neodimio-ferroboron, eje de alta resistencia,
Codificador Tamagawa, rodamiento de gran tamaño, encapsulado por resina.








Rendimiento de respuesta de alta velocidad
•respuesta de frecuencia de hasta 1,0KHz velocidades.•menor tiempo de posicionamiento.
• Alta velocidad y alta precisión sincrónica en tiempo real
comunicación basada en el diseño de sistemas paralelizados.
Posicionamiento de alta precisión
•codificador de valor incremental de 17 bits y absoluto de 23 bits,
con el potente rendimiento de control, puede hacer que el
precisión de posicionamiento inferior a 5 pulsos de encoder.
Serie de productos de Abandant
•Analog & pulse Standard y Network Type con
Compatible con el protocolo EtherCATor CANopen o RS485;
•2500 ppr o tipo serie incremental de with17 bits o 23 codificador de valores absolutos de bit disponible
Tamaño pequeño
•Tamaño similar a la unidad Panasonic serie A6, junto con el servomotor SINEE SES, puede ayudar a minimizar el volumen del sistema.
Controles inteligentes
•supresión de resonancia inteligente
El sistema tiene cuatro (4) sistemas de supresión de resonancia de alta frecuencia
Filtros de muesca, dos (2) de ellos son los basados en FFT; los otros
son manuales.
De forma sincrónica, se proporcionan los filtros de supresión de vibraciones
para minimizar la vibración de la máquina de brazo largo.
•Control de las funciones de conmutación de ganancia
La estructura del bucle de control sobre la base del PDFF puede reducir
sobredisparo eficiente.
El parámetro auto-ajuste en base a la inercia
puede mejorar la adaptabilidad del sitio.
Alta fiabilidad
•función de protección completa y diseño EMC
Diseño de la función de protección en función de la fiabilidad general del motor y el conductor;
Diseño de EMC basado en la optimización graduada y la adaptabilidad del sistema.
•material y tecnología de motor de alto rendimiento que garantizan el funcionamiento del sistema de forma fiable
Que contiene acero magnético de disprosium-neodimio-ferroboron, eje de alta resistencia,
Codificador Tamagawa, rodamiento de gran tamaño, encapsulado por resina.


| Elemento | Especificación | |||||
| Señal de entrada/salida | Entrada digital | Señal modificable distribución | DI. De 8 vías | |||
| Servo habilitado, restablecimiento de fallos, borrado del contador de errores de impulsos de posición, selección de dirección de órdenes de velocidad, etapas múltiples de posición/velocidad Interruptor, fijación de posición cero activada, activación de mando interno, interruptor de modo de control, pulso inhibido, Accionamiento positivo inhibido, Conducción negativaIndiado, segundo límite de par, avance lento positivo, avance lento negativo, otros | ||||||
| Salida digital | Señal modificable frecuencia de división | 4 vías D0 | ||||
| Servoasistencia, salida de freno, salida giratoria del motor, señal de velocidad cero, proximidad de velocidad, llegada de velocidad, proximidad de posición, llegada de posición, límite de par, límite de velocidad, salida de aviso, salida de fallo, otros | ||||||
| Funciones internas | Función de prevención de sobremarcha | P-OT, N-OT tomar efecto, parada de desaceleración | ||||
| Pantalla LED | Display LED de 5 bits: CARGA del circuito principal | |||||
| Función de protección | Sobretensión, subtensión, sobrecorriente, sobrevelocidad, sobrecalentamiento IGBT, sobrecarga, anomalía del codificador, Error de posición grande, fallo de EEPROM, otros | |||||
| Otros | Interruptor de ganancia de dos etapas, ajuste automático de ganancia, 4 grupos de registros de alarma, funcionamiento JOG | |||||
| Funciones de comunicación | Modo de comunicación | RS232, EtherCAT | ||||
| Comunicación por bus EtherCAT | Ciclo de sincronización: 1ms o su múltiple integral | |||||
| Compatible con el protocolo COE y los siguientes modos de funcionamiento: Modo de posición de perfil Modo de velocidad de perfil Modo de par de perfil Modo de posición de interpolación Modo de posición síncrona cíclica Modo de velocidad síncrona cíclica Modo de par síncrono cíclico Modo de inicio | ||||||
| Elemento | Descripción |
| Tratamiento antioxidante | Antes de la instalación, limpie el "inhibidor de óxido" de la extensión del eje del servomotor antes de realizar el tratamiento antioxidante correspondiente. |
| Notas para codificadores | •la extensión del eje no tendrá impacto durante la instalación, de lo contrario el codificador del interior estará agrietado.  |
| Instalación de la polea | • al instalar poleas en un eje de servomotor con chavetero, utilice orificios para tornillos en el extremo del eje para instalar la polea, inserte primero el clavo de doble cabeza en el orificio para tornillos del eje, utilice una arandela en la superficie del extremo de acoplamiento, y apretar gradualmente la polea con una tuerca. |
| •para el eje del servomotor con chavetero, instálelo con el orificio del tornillo en el extremo del eje. Para un eje sin chavetero, se pueden adoptar acoplamientos de desgaste o métodos similares. | |
| •cuando se retira la polea, se debe utilizar un extractor de polea para evitar que el cojinete se impacte. | |
| •para garantizar la seguridad, se instalará una cubierta protectora o un dispositivo similar en la zona giratoria. | |
 | |
| Centrado | •Utilice un acoplamiento para conectar el dispositivo a la máquina y mantenga el eje del servomotor en línea recta con el de la máquina. El descentramiento radial del acoplamiento no debe ser superior a 0,03 mm. Si el centrado no es suficiente, se producirá vibración, lo que puede dañar los rodamientos, codificadores, etc. |
| Dirección de instalación | •el servomotor puede instalarse en dirección horizontal o vertical. No instale el dispositivo de forma oblicua, ya que de lo contrario podría desgastar el cojinete del motor. |
| Contramedidas para el petróleo y el agua | Para su uso en lugares con goteo de agua, confirme la clasificación de protección del servomotor antes de su uso (excepto la parte de penetración del eje). Para su uso en lugares donde el aceite gotea a la parte de penetración del eje, asegúrese de utilizar servomotores con juntas de aceite. |
| Condiciones de servicio para servomotores con juntas de aceite: | |
| •Asegúrese de que el nivel de aceite esté por debajo del borde del sello de aceite durante el uso. | |
| •Utilice el sello de aceite en un estado en el que la salpicaduras de aceite se pueda mantener en buen grado. | |
| •cuando el servomotor se instale verticalmente hacia arriba, tenga cuidado para evitar la acumulación de aceite en el borde del sello de aceite. | |
 | |
| Condición de tensión del cable | No doble los cables excesivamente ni los tense, especialmente para los cables de núcleo 0,14 mm2 o 0,2 mm2 de los cables de señal del codificador, que son muy delgados. Por lo tanto, no los estire demasiado durante el cableado y el uso.al instalar en la cadena de remolque, se deben seleccionar cables de cadena de remolque de alta flexibilidad. |
| Manipulación de conectores | Para la pieza del conector, preste atención a lo siguiente: |
| •al conectar un conector, asegúrese de que no haya materia extraña, como basura o residuos metálicos en el conector. | |
| •al conectar el conector al servomotor, asegúrese de conectarlo primero desde el lado del cable del circuito principal del servomotor y el cable principal debe estar conectado a tierra de forma fiable. De lo contrario, el codificador puede fallar debido a la diferencia de potencial con PE. | |
| •al cablear, asegúrese de que las patillas están correctamente colocadas. | |
| •el conector está hecho de resina. No aplique ningún impacto en el conector, ya que podría dañarse. | |
| •sostenga siempre el cuerpo principal del servomotor durante la manipulación mientras los cables permanecen conectados. De lo contrario, el conector podría estar dañado o los cables podrían estar rotos. | |
| •Si un cable necesita doblarse, debe tener el cuidado debido durante el cableado para no causar presión o tensión en el conector, de lo contrario, se pueden producir daños o un mal contacto del conector. |






